層ドリフトとアンカー網
層参照はローカルに作れても、時間と距離で必ずずれます。文明が星間で秩序を保つには、そのずれを抑える仕組みが要ります。それがアンカー網です。
層のずれは、距離 d [ly] と時間 Δt [day] で増えます。許容ずれ δmax [rad] を超えないよう、文明はアンカーを配置し、定期的に同期を取り直します。
前章で層参照はローカルの参照値だと述べましたが、その参照値は放っておくと信頼できなくなります。原因は単純で、端末の移動と環境変動が層位相をわずかずつ押しずらすからです。ここでは「どれだけズレるか」を最小モデルで示し、そこからアンカー網と同期周期の設計に繋げます。
以下の式と図は厳密な物理法則というより、運用を決めるための近似式です。文明は実測でパラメータを更新しながら、許容ずれとコストの折衝を行います。
層ドリフトの最小モデル(距離と時間で増える)
層ドリフトは「距離を動くほど、時間が経つほど増える」という直感に従います。そこで距離と時間の寄与を分離して、足し合わせる形にします。
\[ \delta_{\mathrm{RMS}}^2(d,\Delta t)=\sigma_0^2+\alpha\,d+\beta\,\Delta t. \tag{10} \]式(10)は、層位相のずれ(RMS)\(\delta_{\mathrm{RMS}}\) [rad] を距離 d [ly] と時間 Δt [day] の関数として置いた最小モデルです。
\(\sigma_0\) [rad] は初期誤差、\(\alpha\) [rad²/ly] は距離で増える項、\(\beta\) [rad²/day] は時間で増える項です。
線形項にしているのは、短距離・短期間での設計を優先するためです。長距離では非線形が出る可能性がありますが、その場合も係数を区間ごとに更新して使います。
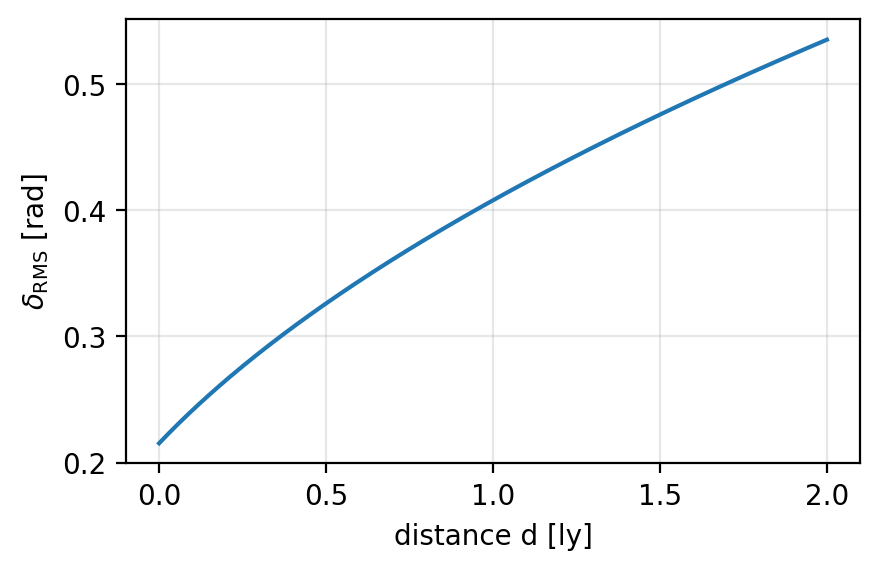
図6-1は「動くほどズレる」を直感的に見せます。たとえ同期頻度を保っていても、長距離の移動は基準のずれを押し広げるので、アンカー間隔そのものが設計変数になります。
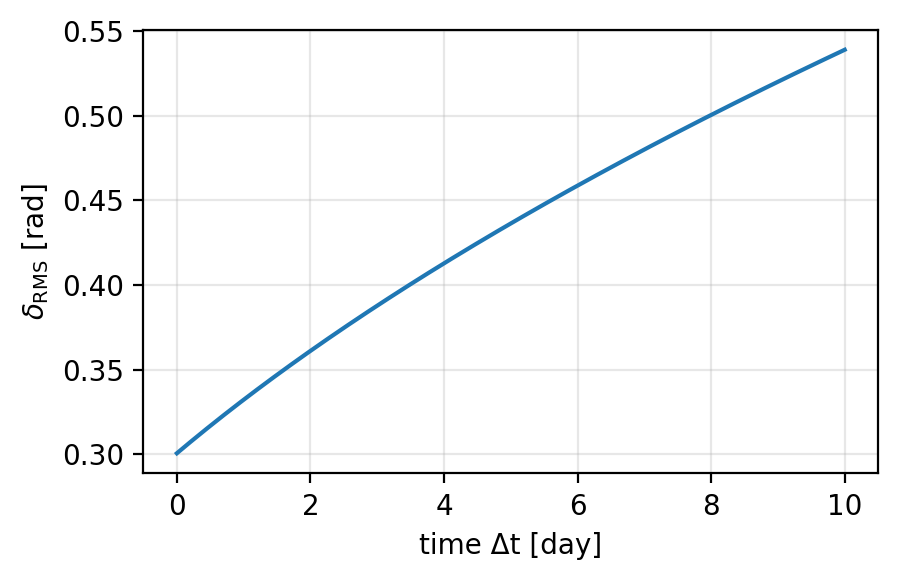
図6-2は「動かなくてもズレる」を示します。端末が同じ場所にあっても、周囲場や内部誤差で層は滲みます。だからアンカー網は、空間配置だけでなく周期的な再同期も含めた制度です。
たとえば \(\sigma_0=0.08\,\mathrm{rad}\)、\(\alpha=0.12\,\mathrm{rad^2/ly}\)、\(\beta=0.02\,\mathrm{rad^2/day}\)、
同期しない時間を \(\Delta t=2\,\mathrm{day}\)、許容ずれを \(\delta_{\max}=0.30\,\mathrm{rad}\) と置くと、
式(10)から \(d\lesssim 0.36\,\mathrm{ly}\) が目安になります。
つまり「アンカーを 0.36 光年ごとに置く」か「同期周期を短くする」か、どちらかが必要です。
要するに、距離 d、同期周期 Δt、許容ずれ δmax の三つがトレードオフです。どれを厳しくするかは、目的(航法、条約、軍事)によって変わります。
アンカー網:星間での“参照の継ぎ目”
アンカーは「この場所では、この層位相を基準にする」という合意点です。星間ではアンカーを鎖のように配置し、
隣接アンカー間で層を写像して、遠方同士の比較を可能にします。
アンカーは物体というより制度です。基準位相、更新手順、署名、監査者の組をまとめて「ここが基準だ」と宣言します。物理的には観測施設や精霊端末で支えられますが、重要なのは合意の継続性です。
星間では単一の基準を共有できないため、近い基準を順に橋渡しします。図6-3はその最小形で、各矢印が一回の写像に相当します。
遠距離の比較は、隣接区間の同期(写像)を積み重ねて作る。
この連鎖は「距離の道」ではなく「信頼の道」です。どのアンカーを通るかで、到達できる層参照と責任の範囲が変わります。
アンカーの種類と配置密度
アンカーは用途でいくつかに分かれます。恒星系の“いま”を固定する核、星間をつなぐ中継、
作業や救難で短期的に張る仮設です。網はすべてを等密度にはできないため、幹線は高品質、枝線は粗い基準で回します。
分類を明示するのは、運用責任と品質保証が異なるからです。核は恒常的に監査され、失敗したときの社会的影響が大きい。仮設は短期の安全確保が目的で、長期の整合性は保証しません。
| 種別 | 役割 | 維持の特徴 |
|---|---|---|
| 恒星核アンカー | 恒星系の基準。条約・監査・ログの根になる。 | 高安定・更新頻度が高い |
| 中継アンカー | 隣接恒星系の写像を作る。幹線網を形成。 | 中安定・交通量で密度が変わる |
| 仮設アンカー | 作業・戦闘・救助での短期基準。 | 低安定・期限が短い |
ここでの「高安定」や「低安定」は、絶対的な性能ではなく、更新頻度と許容ずれの設定を指します。実際には、政治的・経済的な理由で上位アンカーが弱体化することもあり、その場合は網の設計を組み替えます。
更新周期: 短
許容ずれ: 小
更新周期: 長
許容ずれ: 大
幹線は高品質を維持し、枝線は柔らかい基準で運用する。
図6-4は、同じ星間空間でも品質の勾配があることを示しています。幹線の品質が落ちると全域の写像が崩れるため、文明は幹線だけは過剰に保守します。
同期の品質を測る(監査の最小)
層同期は成功・失敗の二択ではなく、どれほど一致しているかの連続量として扱う必要があります。監査や条約で「ここまで一致していれば同一」と定義するためです。
そこで簡単な指標として可視度 V を置きます。位相差が大きいほど干渉が弱くなる、という直感を数式化したものです。
\[ V(\delta)=\exp\!\left(-\frac{\delta^2}{2}\right). \tag{11} \]式(11)は、層位相のずれ \(\delta\) [rad] が増えると、同期の“見え方”が落ちる、という単純な形です。V [-] は無次元で、1に近いほど同期が良い。
V は計測可能な指標に翻訳できるので、制度の設計に使えます。たとえば Vmin を決めることで、許容される同期品質の最低ラインを定義できます。
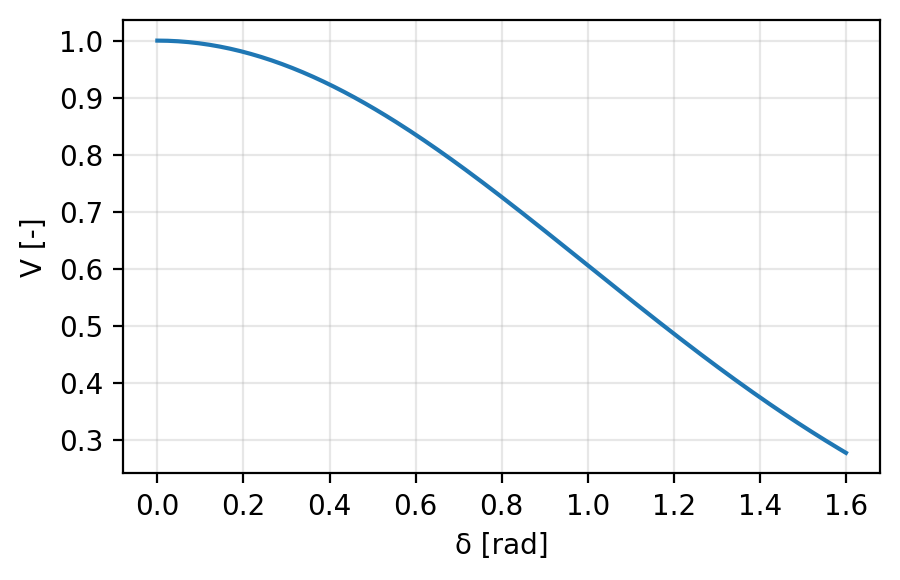
図6-5では、δ が 0.5 rad を超えるあたりから V が急に落ちることが分かります。つまり“ほどほどのズレ”でも実務上の整合性は急速に失われます。
\(\delta=0.30\,\mathrm{rad}\) なら \(V\approx 0.96\,[-]\)。\(\delta=1.0\,\mathrm{rad}\) なら \(V\approx 0.61\,[-]\)。
たとえば条約・航法・金融のように「改ざん耐性」が要る領域では、V の下限を設けることで運用ルールが作れます。
連鎖写像の誤差伝播
アンカー列を辿るとき、誤差は一回ごとに持ち越されます。これは通信の多段中継や測地の連鎖と同じで、遠距離ほど不確かさが増えます。
\[ \delta_{\mathrm{chain}}^2 \approx \sum_{k=1}^{N} \delta_k^2 + \delta_{\mathrm{bias}}^2. \tag{12} \]式(12)は、アンカー列を N 区間つないだときの誤差の最小モデルです。
各区間の写像誤差 \(\delta_k\) が独立なら、全体誤差は二乗和の平方根で増えます。
\(\delta_{\mathrm{bias}}\) は系統的な偏りです。例えば、特定のアンカー群が同じ方向にずれると、単純な二乗和より大きな誤差になります。偏りを見つけるには、周期的な長距離監査が必要です。
全区間が同程度の誤差 \(\delta_{\mathrm{seg}}\) なら、\(\delta_{\mathrm{chain}}\approx \sqrt{N}\,\delta_{\mathrm{seg}}\)。
たとえば N=9、\(\delta_{\max}=0.30\,\mathrm{rad}\) を守るなら、各区間は \(\delta_{\mathrm{seg}}\lesssim 0.10\,\mathrm{rad}\) が目安です。
このため幹線アンカーでは、区間ごとに許容誤差を配分し、必要なら区間数自体を減らします。距離よりも経路の品質が優先される理由です。
再同期プロトコル(最小)
再同期は「層を合わせる」というより、基準への写像を更新する手続きです。
署名・品質・期限をセットで持たせると、低品質な同期を排除できます。
重要なのは、同期が「信用情報」として扱われる点です。誰が、いつ、どの品質で同期したのかが記録され、後で検証できるようにします。そうしないと、改ざんや過去の同期の再利用が起きます。
sync_request := (anchor_id A, ell_local, tolerance delta_max, ttl dt, signature)
anchor_reply := (ell_anchor, correction d_ell, quality V, timestamp, signature)
apply if V >= V_min and |d_ell| <= delta_cap within ttl
otherwise fall back to local mode or retrysync_request は端末側の現状と要求水準を提示し、anchor_reply は補正量と品質を返します。Vmin は用途ごとの最低品質、delta_cap は危険な大幅補正の禁止、ttl は古い応答の排除です。
応答が条件を満たさない場合、端末は「ローカル運用」に戻るか、別のアンカーへ問い合わせます。同期は自動的な救済ではなく、選択可能な手続きです。
再同期周期の設計
同期周期は「どれだけ放置してよいか」を示す運用パラメータです。距離が長くなるほど、同じ許容ずれでも再同期を早める必要があります。
\[ \Delta t_{\max} \approx \frac{\delta_{\max}^2-\sigma_0^2-\alpha d}{\beta}. \tag{13} \]式(13)は、式(10)の条件 \(\delta_{\mathrm{RMS}}\le\delta_{\max}\) を満たすための最大周期です。
分子が負なら、同期周期をいくら短くしても許容ずれに収まらず、アンカー間隔を詰める必要があります。
この式は「距離が長い区間ほど短い周期」という運用の基本を定量化します。計算上は簡単でも、実際は通信遅延やコストがあるため、周期の上限は政治的合意でもあります。
\(\sigma_0=0.08\,\mathrm{rad}\)、\(\alpha=0.12\,\mathrm{rad^2/ly}\)、\(\beta=0.02\,\mathrm{rad^2/day}\)、
\(d=0.25\,\mathrm{ly}\)、\(\delta_{\max}=0.30\,\mathrm{rad}\) なら \(\Delta t_{\max}\approx 2.7\,\mathrm{day}\)。
週単位の同期しかできないなら、距離を縮めるか許容ずれを緩める必要があります。
もし運用上どうしても周期を短くできないなら、許容ずれを緩めるか、アンカー列を増やすしかありません。技術ではなく制度の問題として現れます。
障害と断絶の扱い
アンカー網は現実のインフラと同じく、断線・故障が前提です。
断絶が起きたときは「安全に縮退する設計」が重要になります。
断絶は単なる通信障害ではなく、同期制度の断裂です。同じ出来事でも異なる層参照で記録されるため、秩序の裂け目が生まれます。
- 断絶区間は「低保証モード」に切り替え、\(\delta_{\max}\) を緩めた運用で限定的に回す。
- 近傍の仮設アンカーを置き、救難・避難など短期手続きを成立させる。
- 断絶期間のログは必ず署名付きで保管し、復旧後に写像を再計算する。
- 恒星核アンカーが失われた場合は、最寄りの中継アンカーへ暫定移行し、基準の“空白”を作らない。
断絶が長期化すると、同じ出来事を別の層で記録する“二重史”が生まれます。復旧後は、どの記録を正とするかの政治的交渉が不可避です。
- 星間文明は「道」ではなく「網」を作る。網の外は、同時性も責任も薄くなる。
- アンカーを壊すのは軍事的に強い。航行・通信・条約の全てが不安定になる。
- 全能に近い存在は、アンカーなしでも同期できる。しかしそれは例外で、通常は網が必要。